Rice Eclipse Rocketry team

Our team at my first rocketry competition in 2022. I’m 2nd from right.
Team Overview:
Rice Eclipse is an undergraduate rocketry team that builds rockets for intercollegiate rocketry competitions, builts rocket engines, and develops rocket hardware and software. I joined Rice Eclipse to gain hands-on and practical engineering skills and meet fellow engineers at Rice.
I was a member of our Payload team for my freshman and sophomore year, and I led the Payload team during my junior year. The payload team designs an experiment to fly inside the rocket and collects data.
Three Years, three payload projects:
2021-2022: Payload team built a CubeSat payload to mount a graduate student research project to investigate whether it could withstand the vibrations of flight.
2022-2023: Payload team designed a spring-loaded folding drone to deploy from the rocket on descent.
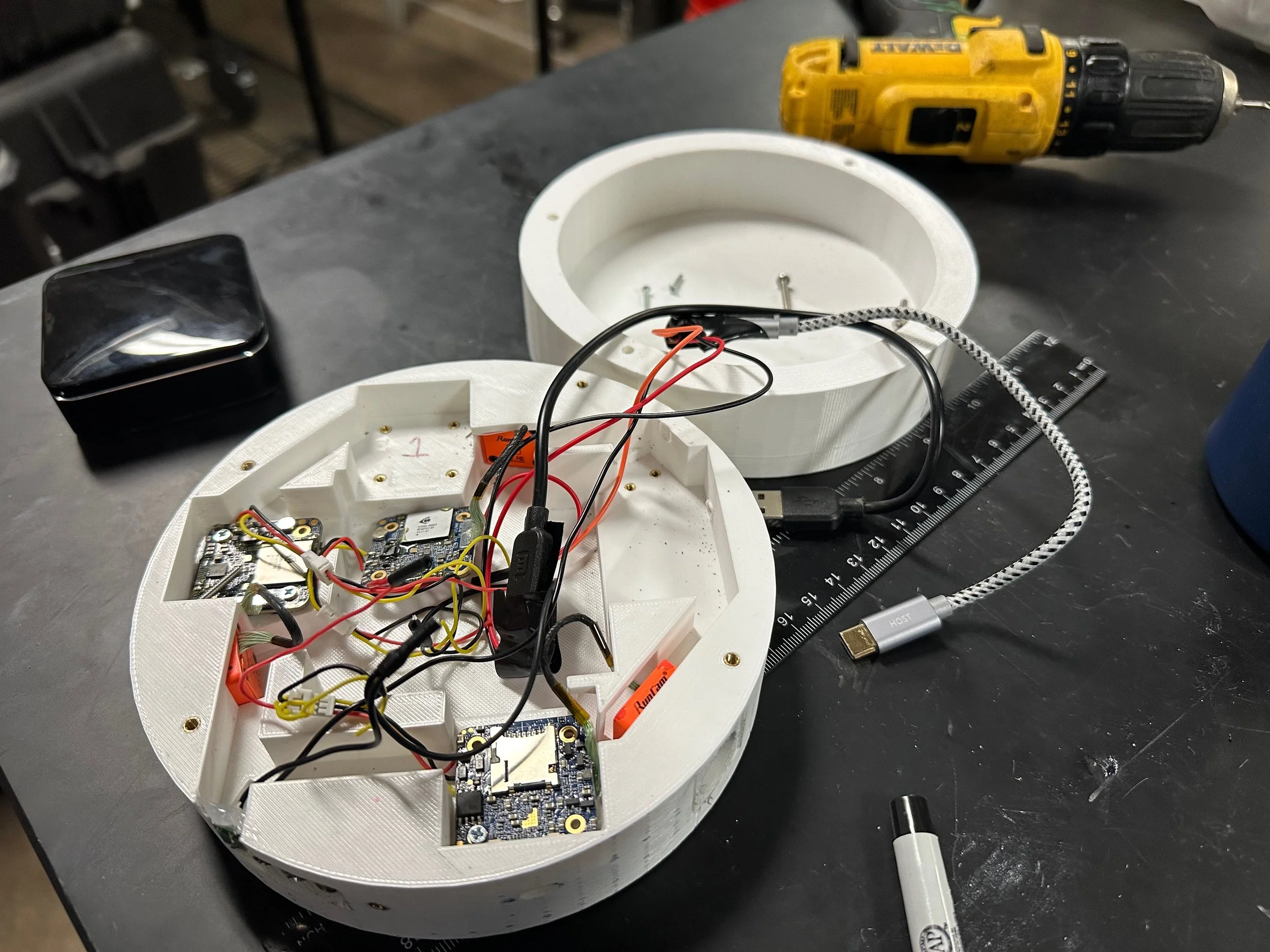
2023-2024: Payload team designed a device to record 360 degree video and rocket vibrations, as well as a haptic device to create a rocket simulation from the perspective of inside the rocket.
2022 Payload: Grad Student Vibration Testing

My specific contributions:
I constructed most of the CAD models for this project. I also did all of the 3D printing. I assisted with the water jetting and the machining, watching how other team members machined a part before machining another copy myself. Most of the design work was done collaboratively as a team.
Experiment:
Our team partnered with graduate student researcher Ajay Garg to test his passive heat switch device for thermal regulation of lunar spacecraft. His device utilizes a temperature dependent magnet that prevents heat from escaping when the external temperatures are too cold by turning off, but when temperatures are too hot, the device moves to the on state to allow heat flow. Our payload would test several of his devices and capture vibration data from each device using triple-axis accelerometers to ensure that the devices can withstand the strong vibrations when launching to space.
Payload Design:
Our team chose to make a payload box out of ⅜ inch square rods in four corners and plates in the middle to provide structure and platforms for for the experiment devices. We chose to make the rods out of 304 steel since they are the main structural component and steel's high density would help us reach the minimum weight requirement.

Passive heat switch device side view

Heat switch device inside 3D printed enclosure
Next, we chose to use four devices to test two independent variables (modifications of the design) of Ajay's experiment (Note: we later changed the number of devices to only three when we realized we would need more space for electronics in the payload). We chose to use thick aluminum plates as the platforms in the payload because aluminum is easy to machine and the plates would not be load bearing. We optimized the thickness of the aluminum plates (0.5 in) to achieve the optimal payload weight of 8.8 lbs (using weight estimates of the experiment and electronics). We chose to use countersunk bolts to attach the plates to the rods so that the bolts were flush with the rods.
The payload attaches to the rocket by being bolted to a circular aluminum base plate with radial holes for the baseplate to be bolted to the interior of the carbon fiber body tube of the rocket. We placed an acrylic buffer on the other end of the payload to keep the payload secure and prevent vibrational damage. We chose to make the buffer out of acrylic since acrylic is light and we decided to add the buffer to the payload after we finalized the rest of the design.
Lastly, we designed 3D printed mounts to secure the experiment devices to the plates.
Manufacturing:
With our design finalized, we started manufacturing by water jetting seven aluminum plates (top, bottom, three for the devices, and two for the electronics). After cutting out a couple plates from a larger sheet, we realized that the water jet had some very serious tolerance issues. We discovered how some of the corners on the plates were not cut to 90 decrees and thus the square rods did not fit in the plate corners. We decided to use a mill to square out the plate corners and we used the mill to cut out the rest of the plate corners. We used a bandsaw and grinders to cut the steel rods to a length of 30 cm.
We used the mill to drill holes in the plates for the device mounts and for attachment to the steel rods. We also drilled holes in the rods and used a countersink drill bit on each hole. Lastly, we tapped the rod-attachment holes of the aluminum plates and then inserted helicoils to strengthen the threads. We used the mill to drill all of our holes since precision was extremely important for all of our parts to fit together. We used the mill to measure the distance between holes, to ensure we were drilling in the center of each part, and to ensure we drilled no deeper than 0.5 inches for the holes with helicoil inserts.
Next, we machined a 5.78 inch diameter aluminum base plate by cutting a circle out of a 0.6 inch thick sheet using a water jet. We then used a manual lathe to smooth the outer surface. Next, we used a mill to drill six evenly-spaced holes on the baseplate and then tapped the holes and inserted helicoils. We lasercut the buffer out of acrylic.
The last step of manufacturing was to 3D print the mounts for the experiment devices and use bolts to assemble the payload structure. We used glue and tape to secure the electronics (Arduinos + batteries + accelerometers).
Results:
Unfortunately, we did not receive any useful results from this project since our rocket main parachute failed to deploy and our rocket hit the ground hard, breaking all of the heat switch devices and enclosures. However, we were able to collect some accelerometer data.

CubeSat Payload CAD

Assembly after machining
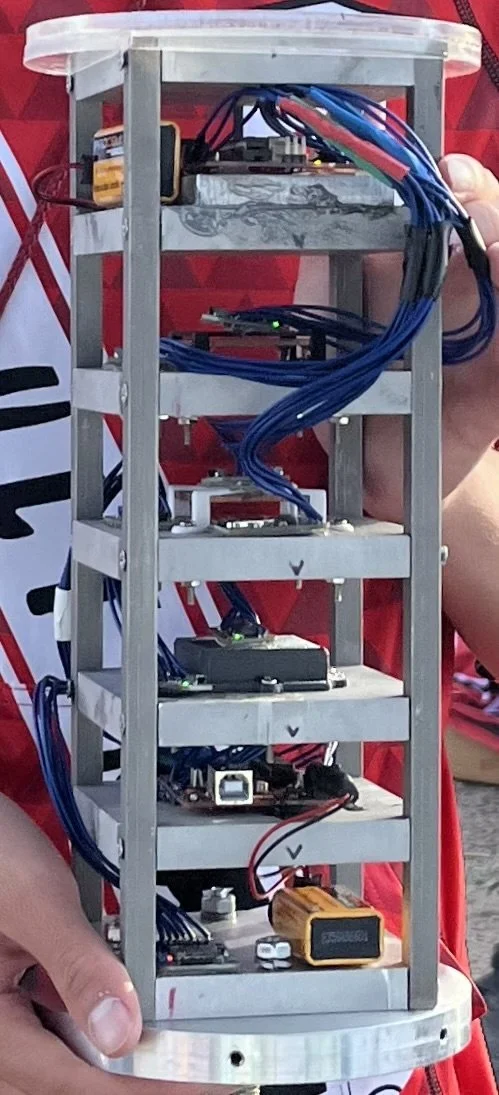
Fully assembled payload, right before entering the rocket for launch
2023 Payload: Drone Deployment from Rocket (Coming soon)
2024 Payload: 360 degree video and Haptic Device (Coming soon)
The goal of last year's payload project was to create three devices.
A CubeSat to vibration data from inside the rocket
A camera block with three cameras to record 360 degree video from inside the rocket
A device to replicate the recorded vibrations and display video feed, creating a simulation from the perspective of being inside the rocket
While we were able to build all three devices, issues with camera firmware prevented us from recording video on all three cameras.